Оставьте заявку и получите
Коммерческое предложение со всеми техническими характеристиками робота-штукатура + анализ рынка штукатурных работ РФ

ПЕРЕДОВАЯ ТЕХНОЛОГИЯ ДЛЯ АВТОМАТИЗАЦИИ ШТУКАТУРНОГО ПРОЦЕССА С ОКУПАЕМОСТЬЮ
Роботизированная-штукатурная станция полноценно заменяющая несколько бригад рабочих! Увеличивает производительность, сокращает расходы
Вы можете задать вопрос в удобном мессенджере:
Рейтинг на основании отзывов в Яндекс Картах

Инновационное правило с функцией изменения длины и контроля сложных форм
Рельсовая система с домкратами, датчиками расстояния и уровнями для работы без маяков
Экономия до 70% на зарплатном фонде
Увеличение объемов до 500 кв/м за рабочую смену
Разборная конструкция легкая в транспортировке
Оставьте заявку и получите коммерческое предложение и сопроводительную документацию по роботу-штукатуру
Полностью сертифицированная и запатентованная технология

3 МЕСЯЦА
Бонус: Презентация со всеми техническими характеристиками
ПЕРЕДО ВАЯ ТЕХН ОЛОГИЯ ДЛЯ АВТОМАТИЗАЦИИ ШТУКАТУРНОГО ПРОЦЕССА, С ОКУПАЕМОСТЬЮ

3 МЕС
ПЕРЕДОВАЯ ТЕХНОЛОГИЯ
РОБОТ-ШТУКАТУР
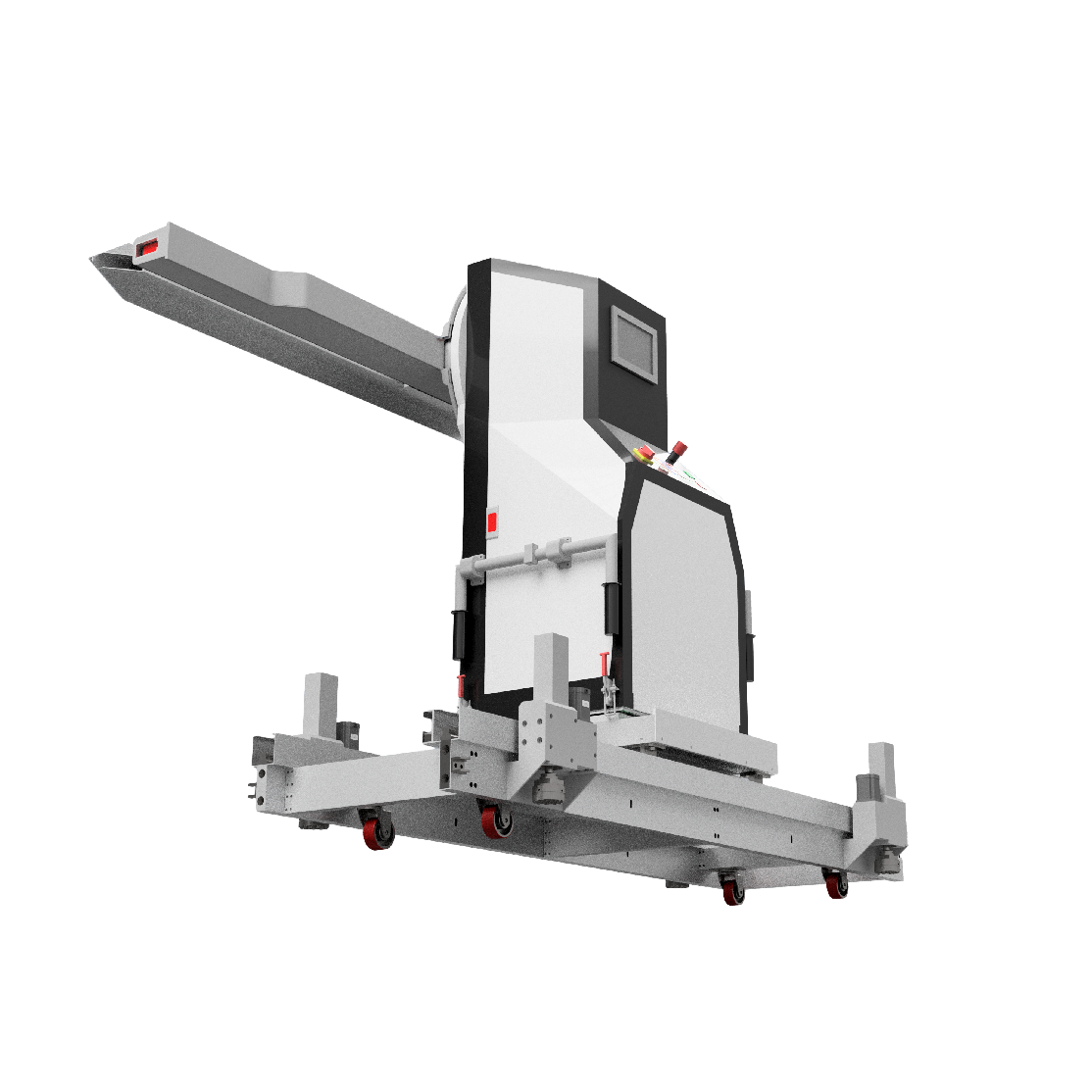
Превосходство в каждой детали
Преимущества Робота-Штукатура перед аналогами и мастерами
Беспрецедентная производительность
От 300м² до 500 м² за 8 часовую рабочую смену, в 3 раза эффективней чем бригада штукатуров из 8 человек. Автоматизированная система движение робота вдоль заданной поверхности обеспечивает непрерывное оштукатуривание высочайшего качество, сокращая сроки реализации проектов.
Получить предложение
Ровное и точное покрытие
Забудьте о погрешностях. Робот гарантирует идеальный результат без маяков, благодаря системе лазеров и датчиков расстояния. Он оснащен инновационным правилом изменяющем длину и учитывающим сложности архитектуры.
Получить предложение
Окупаемость и экономия
Срок окупаемости инвестиций от 3 месяцев. Автоматизация процесса оштукатуривания позволяет существенно увеличить объем производимых работ минимизируя влияние человеческого фактора. Сокращение расходов с повышением качества за счет снижения затрат на материалы и рабочих.
Получить предложение
Видео-презентация
Результаты работ
Примеры покрытий выполненных нашей роботизированной системой
Другие уникальные особенности
- 1Легкость транспортировкиУстройство разделяется на две части, что обеспечивает удобство для перевозки
- 2Моментальная установкаРазвертывание и установка робота на объекте занимает ± 1 минуту
- 3Бесшумная технологияРобот работает бесшумно, подключаясь к сети 220 В. обеспечивая беспрерывную работу даже в жилых помещениях
- 4Соответствие самым высоким стандартамКачество – наша главная цель. Робот-штукатур работает в полном соответствии с СНИП, предоставляя вам штукатурное покрытие высочайшего класса. Ровно, надежно, безукоризненно.
- 5Техническая поддержкаМы стремимся максимизировать вашу производительность. Если у вас есть вопросы, требующие дополнительных разъяснений, или если вам необходима техническая помощь, наша команда всегда на связи.
- 6До 70% экономии на трудозатратахДля управления и транспортировки робота необходимо 2 специалиста. При этом производительность превышает несколько бригад.
Оставьте заявку и получите:
Подробные PDF-материалы с техническими характеристиками, исследованием рынка и информацию о осуществлении предзаказа
Как осуществляется предзаказ?
1
Заявка
Вы оставляете заявку на получение PDF-материалов и предзаказ
2
Связь с менеджером
Менеджер сопровождает вас от информирования до оплаты по договору
3
Производство
В течении 2 месяцев мы производим сборку вашей роботизированной установки
4
Поставка
По завершению производства мы осуществляем доставку робота и тех. поддержку
Популярные вопросы и ответы на них
До разработки нашего штукатурного робота, на рынке были представлены несколько устройств пытающихся занять место в нише автоматизации штукатурного процесса. Однако, они имели серьезные недостатки, такие как исключительно линейное выравнивание без возможности обеспечить равномерное покрытие за пределами диапазона действия, только горизонтальное движение, и линейное перемещение. Они требовали ручной настройки уровня работы и оставляли «слепые зоны», которые приходилось выравнивать вручную.
- Робот способен автоматически определить поверхность и произвести выравнивание в режиме реального времени. Благодаря датчикам пространственного положения, лазерным указателям и современной системе управления, он распознает геометрию поверхности и корректирует свое положение для достижения идеального результата.
- Инновационный аппаратный и программный комплекс позволяет роботу функционировать в разнообразных режимах, включая вертикальное и горизонтальное движение, а также круговое выравнивание. Это означает, что теперь нет необходимости переставлять робота для выравнивания всей поверхности.
- Одной из самых значимых проблем, решенных новым штукатурным роботом, является отсутствие «слепых зон». Робот способен автоматически корректировать свое положение и выполнять выравнивание даже на больших площадях без необходимости перестановки и ручной коррекции.
Если у вас остались, вопросы, пожалуйста, напишите нам на vvtecno@yandex.ru или свяжемся по телефону +78005058043
Узнайте стоимость робота
И получите дополнительную техническую документацию
Адрес нашего офиса: г. Краснодар, ул. Индустриальная 14а
ООО "В В ТЕХНОЛОГИЧЕСКАЯ КОМПАНИЯ"
ИНН: 2308293667
ОГРН: 1232300055800
ОГРН: 1232300055800
Адрес
г. Краснодар, ул. Индустриальная 14а, 350007
Телефон / почта
