Оставьте заявку и получите
Коммерческое предложение со всеми техническими характеристиками робота-штукатура + анализ рынка штукатурных работ РФ

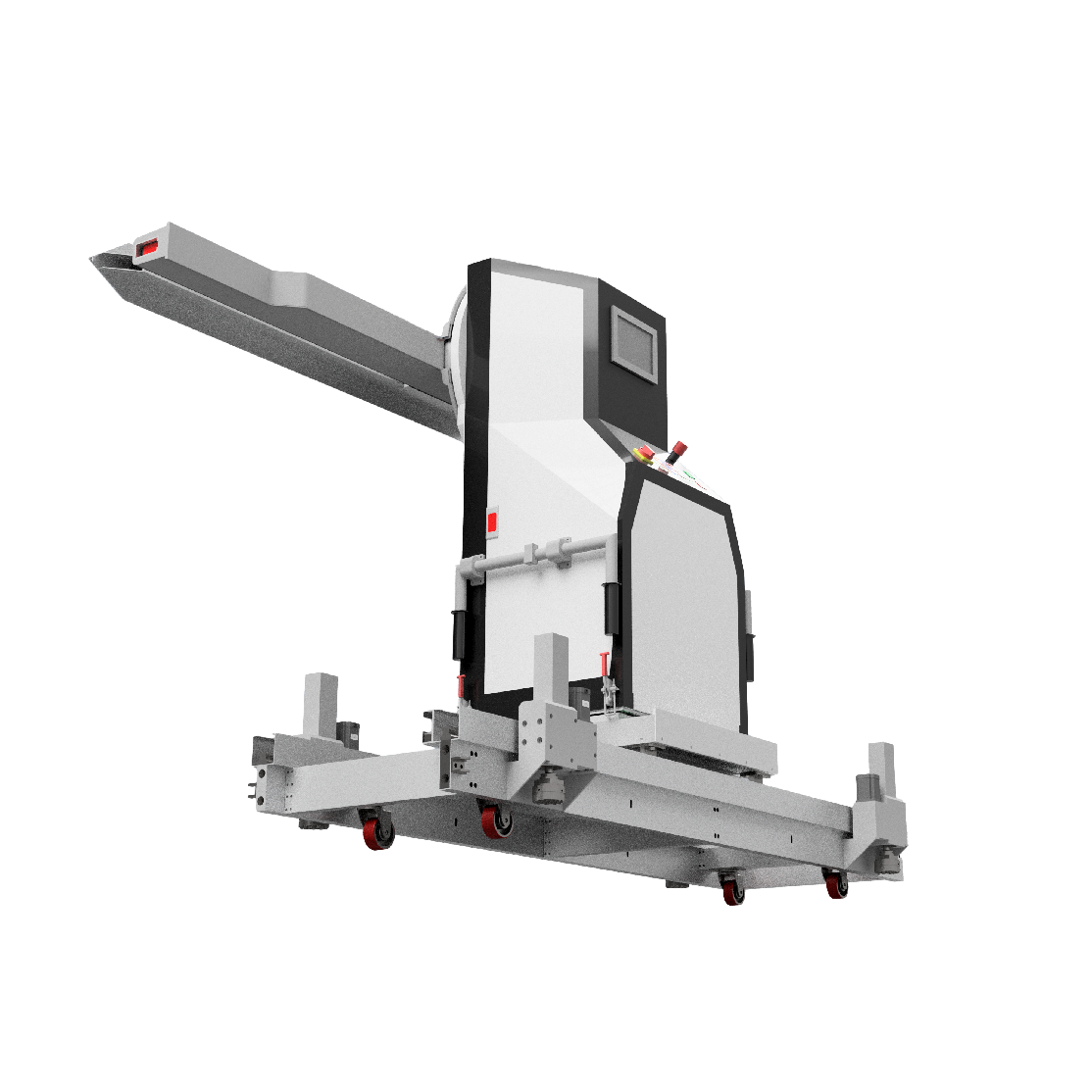
Robotic plastering station replacing several teams of workers! Increases productivity, reduces costs
ADVANCED TECHNOLOGY FOR AUTOMATION OF THE PLASTERING PROCESS WITH PAYBACK TIME
You can ask a question in a convenient messenger:
Rating based on reviews in Yandex Maps

Innovative rule with length change function and control of complex shapes
Rail system with jacks, distance sensors and levels for working without beacons

3 MONTHS
Savings of up to 70% on the payroll fund
Increase of volumes up to 500 m² per working shift
Collapsible design easy to transport
Leave a request and receive a quotation and supporting documentation for the plastering robot
Fully certified and patented technology
Bonus: Presentation with all technical specifications
ADVANCED TECHNOLOGY111 FOR AUTOMATION OF THE PLASTERING PROCESS, WITH PAYBACK TIME

3 MONTHS
ADVANCED TECHNOLOGY
ROBOT-PLASTERER
Excellence in every detail
Advantages of Robot Plasterer over analogs and craftsmen
Unprecedented performance
From 300m² to 500m² in an 8 hour shift, 3 times more efficient than an 8 man plastering crew. The robot's automated system of movement along a given surface ensures continuous plastering of the highest quality, reducing the time required to complete projects.
Get a quote
Smooth and precise coverage
Forget about inaccuracies. The robot guarantees perfect results without beacons, thanks to a system of lasers and distance sensors. It is equipped with an innovative rule that changes length and takes into account the complexities of the architecture.
Get a quote
Payback and savings
Payback period of investment from 3 months. Automation of the plastering process allows you to significantly increase the volume of work performed while minimizing the influence of human factor. Cost reduction with quality improvement due to lower costs for materials and workers.
Get a quote
Video presentation
Work results
Examples of coatings made by our robotic system
Other unique features
- 1Easy transportationThe unit separates into two parts for easy transportation
- 2Instant installationDeployment and installation of the robot on site takes ± 1 minute
- 3Silent technologyThe robot works quietly, connected to the 220V mains supply. providing uninterrupted operation even in residential areas
- 4Compliance with the highest standardsQuality is our main goal. The robot plasterer works in full compliance with SNIP, giving you a plaster finish of the highest caliber. Smooth, reliable, flawless.
- 5Technical supportWe are committed to maximizing your productivity. If you have any questions that require further clarification or if you need technical assistance, our team is always available.
- 6Up to 70% savings on labor costsThe robot requires 2 technicians to operate and transport the robot. At the same time the productivity exceeds several crews.
Leave an application and get:
Detailed PDF materials with technical specifications, market research and pre-order information
How does pre-ordering work?
1
Application
You leave the application for PDF materials and pre-order
2
Communication with manager
The manager accompanies you from informing you to contractual payment
3
Production
We assemble your robotic system within 2 months
4
Supply
Once production is complete, we deliver the robot and provide technical support
Popular questions and answers
Prior to the development of our plastering robot, there were several devices on the market attempting to fill the niche of plastering automation. However, they had serious shortcomings such as only linear leveling without the ability to provide uniform coverage beyond the range of operation, only horizontal movement, and linear movement. They required manual adjustment of the work level and left blind spots that had to be leveled manually.
- The robot is able to automatically detect the surface and perform real-time leveling. Thanks to spatial position sensors, laser pointers and an advanced control system, it recognizes the geometry of the surface and adjusts its position to achieve the ideal result.
- Innovative hardware and software allows the robot to function in a variety of modes, including vertical and horizontal movement as well as circular leveling. This means there is now no need to reposition the robot to level the entire surface.
- One of the most significant problems solved by the new plastering robot is the absence of blind spots. The robot is able to automatically correct its position and perform leveling even on large areas without the need for repositioning and manual correction.
If you have any remaining, questions, please email us at vvtecno@yandex.ru or contact us at +78005058043
Find out the cost of the robot
And get additional technical documentation
Address of our office: Krasnodar, Industrial str. 14a
LLC "V V TECHNOLOGY COMPANY"
ИНН: 2308293667
ОГРН: 1232300055800
ОГРН: 1232300055800
Address
Krasnodar, Industrial str. 14a, 350007
Phone / mail
